





Mis puutub sellesse, miks tühjendusrežiimMOSFETidei kasutata, ei ole soovitatav selle põhja sattuda.
Nende kahe täiustusrežiimi MOSFET-i puhul kasutatakse sagedamini NMOS-i. Põhjus on selles, et sisselülitustakistus on väike ja seda on lihtne valmistada. Seetõttu kasutatakse NMOS-i üldiselt lülitustoiteallika ja mootoriajami rakendustes. Järgnevas sissejuhatuses kasutatakse enamasti NMOS-i.
MOSFET-i kolme kontakti vahel on parasiitmahtuvus. See pole see, mida me vajame, vaid selle põhjustavad tootmisprotsessi piirangud. Parasiitmahtuvuse olemasolu muudab selle ajamiahela projekteerimisel või valimisel tülikamaks, kuid seda ei saa kuidagi vältida. Tutvustame seda üksikasjalikult hiljem.
Drenaaži ja allika vahel on parasiitdiood. Seda nimetatakse kehadioodiks. See diood on väga oluline induktiivkoormuste (näiteks mootorite) juhtimisel. Muide, kehadiood eksisteerib ainult ühes MOSFETis ja seda tavaliselt integraallülituse kiibis ei leidu.
2. MOSFETi juhtivuse omadused
Juhtiv vahend, mis toimib lülitina, mis on samaväärne lüliti sulgemisega.
NMOS-i omadus on see, et see lülitub sisse, kui Vgs on teatud väärtusest suurem. See sobib kasutamiseks siis, kui allikas on maandatud (madala otsa ajam), kui paisu pinge ulatub 4V või 10V-ni.
PMOS-i omadused on, et see lülitub sisse, kui Vgs on teatud väärtusest väiksem, mis sobib olukordades, kus allikas on ühendatud VCC-ga (high-end drive). Siiski, kuigiPMOSsaab hõlpsasti kasutada tipptasemel draiverina, NMOS-i kasutatakse tavaliselt tipptasemel draiverites suure sisselülitavuse, kõrge hinna ja väheste asendustüüpide tõttu.
3. MOS-lüliti toru kadu
Olenemata sellest, kas see on NMOS või PMOS, on pärast sisselülitamist sisselülitatud takistus, nii et vool tarbib selle takistuse pealt energiat. Seda osa tarbitud energiast nimetatakse juhtivuskadudeks. Väikese sisselülitatud takistusega MOSFET-i valimine vähendab juhtivuskadusid. Tänapäeva väikese võimsusega MOSFET-i sisselülitustakistus on üldiselt kümnete millioomide ringis ja seal on ka mitu millioomi.
Kui MOSFET on sisse ja välja lülitatud, ei tohi seda koheselt lõpetada. MOS-i pingel on vähenemisprotsess ja voolaval voolul suureneb protsess. Sellel perioodil onMOSFET-idkadu on pinge ja voolu korrutis, mida nimetatakse lülituskadudeks. Tavaliselt on lülituskaod palju suuremad kui juhtivuskaod ja mida kiirem on lülitussagedus, seda suuremad on kaod.
Pinge ja voolu korrutis juhtivuse hetkel on väga suur, põhjustades suuri kadusid. Lülitusaja lühendamine võib vähendada kadu iga juhtivuse ajal; lülitussageduse vähendamine võib vähendada lülitite arvu ajaühikus. Mõlemad meetodid võivad vähendada lülituskadusid.
Lainekuju, kui MOSFET on sisse lülitatud. Näha on, et pinge ja voolu korrutis juhtivuse hetkel on väga suur ning ka tekitatud kadu on väga suur. Lülitusaja vähendamine võib vähendada kadu iga juhtivuse ajal; lülitussageduse vähendamine võib vähendada lülitite arvu ajaühikus. Mõlemad meetodid võivad vähendada lülituskadusid.
4. MOSFET-draiver
Võrreldes bipolaarsete transistoridega arvatakse üldiselt, et MOSFET-i sisselülitamiseks pole voolu vaja seni, kuni GS-i pinge on teatud väärtusest kõrgem. Seda on lihtne teha, kuid vajame ka kiirust.
MOSFET-i ehitusest on näha, et GS-i ja GD vahel on parasiitmahtuvus ning MOSFET-i juhtimine on tegelikult kondensaatori laadimine ja tühjendamine. Kondensaatori laadimine nõuab voolu, kuna kondensaatorit võib laadimise hetkel lugeda lühiseks, mistõttu hetkevool on suhteliselt suur. Esimene asi, millele MOSFET-draiveri valimisel/konstrueerimisel tähelepanu pöörata, on hetkelise lühisevoolu hulk, mida see suudab pakkuda. )
Teine asi, mida tuleb tähele panna, on see, et NMOS-i, mida tavaliselt kasutatakse tipptasemel sõitmiseks, peab sisselülitamisel paisu pinge olema suurem kui allika pinge. Kui kõrgelt juhitav MOSFET on sisse lülitatud, on allika pinge sama, mis äravoolupinge (VCC), seega on paisu pinge praegu 4 V või 10 V võrra suurem kui VCC. Kui soovite samas süsteemis saada VCC-st suuremat pinget, vajate spetsiaalset võimendusahelat. Paljudel mootorijuhtidel on integreeritud laadimispumbad. Tuleb märkida, et MOSFET-i juhtimiseks piisava lühisevoolu saamiseks tuleks valida sobiv väline kondensaator.
Eelpool mainitud 4V või 10V on üldkasutatavate MOSFETide sisselülituspinge ja loomulikult tuleb projekteerimisel lubada teatud varu. Ja mida kõrgem on pinge, seda suurem on juhtivuskiirus ja seda väiksem on juhtivustakistus. Nüüd on erinevates valdkondades kasutusel väiksema juhtivuspingega MOSFET-id, kuid 12V autoelektroonikasüsteemides piisab üldjuhul 4V juhtivusest.
MOSFET-draiveri ahela ja selle kadude kohta vaadake Microchipi AN799 MOSFET-draiverite ja MOSFET-ide sobitamist. See on väga üksikasjalik, nii et ma ei kirjuta rohkem.
Pinge ja voolu korrutis juhtivuse hetkel on väga suur, põhjustades suuri kadusid. Lülitusaja vähendamine võib vähendada kadu iga juhtivuse ajal; lülitussageduse vähendamine võib vähendada lülitite arvu ajaühikus. Mõlemad meetodid võivad vähendada lülituskadusid.
MOSFET on FET-i tüüp (teine on JFET). Seda saab muuta täiustamisrežiimiks või tühjendusrežiimiks, P-kanaliks või N-kanaliks, kokku 4 tüüpi. Kuid tegelikult kasutatakse ainult täiustusrežiimi N-kanaliga MOSFET-i. ja täiustus-tüüpi P-kanaliga MOSFET, nii et NMOS või PMOS viitavad tavaliselt neile kahele tüübile.
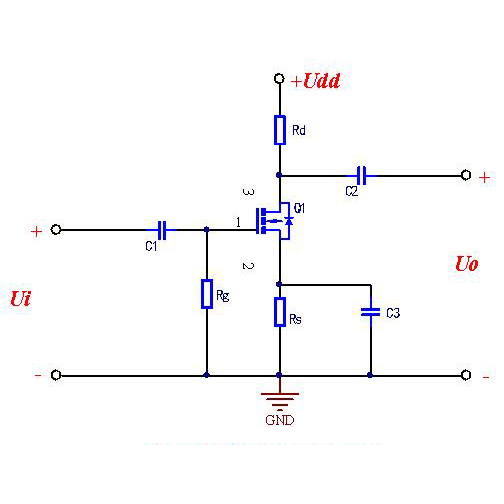
5. MOSFETi rakendusahel?
MOSFETi kõige olulisem omadus on selle head lülitusomadused, mistõttu seda kasutatakse laialdaselt vooluahelates, mis nõuavad elektroonilisi lüliteid, nagu lülitustoiteallikad ja mootoriajamid, samuti valgustuse hämardamine.
Tänapäeva MOSFET-draiveritel on mitu erinõuet:
1. Madalpinge rakendus
5 V toiteallika kasutamisel, kui sel ajal kasutatakse traditsioonilist totemposti struktuuri, kuna transistori pingelangus on umbes 0,7 V, on väravale rakendatav tegelik lõpppinge vaid 4,3 V. Sel ajal valime värava nimivõimsuse
4,5 V MOSFETi kasutamisel on teatud risk. Sama probleem ilmneb ka 3V või muude madalpinge toiteallikate kasutamisel.
2. Lai pingerakendus
Sisendpinge ei ole fikseeritud väärtus, see muutub aja või muude tegurite mõjul. See muutus põhjustab PWM-ahela poolt MOSFET-ile antava ajamipinge ebastabiilsuse.
Selleks, et MOSFETid oleksid kõrge paisupinge korral ohutud, on paljudel MOSFET-idel sisseehitatud pingeregulaatorid, mis piiravad paisu pinge amplituudi jõuliselt. Kui antud ajamipinge ületab pingeregulaatori toru pinge, põhjustab see sel juhul suurt staatilise energiatarbimist.
Samal ajal, kui kasutate paisu pinge vähendamiseks lihtsalt takisti pinge jaotuse põhimõtet, töötab MOSFET hästi, kui sisendpinge on suhteliselt kõrge, kuid kui sisendpinget vähendatakse, on paisu pinge ebapiisav, põhjustades mittetäielik juhtivus, suurendades seeläbi energiatarbimist.
3. Kahe pinge rakendus
Mõnes juhtahelas kasutab loogikaosa tüüpilist 5V või 3,3V digitaalset pinget, toiteosa aga 12V või isegi kõrgemat pinget. Need kaks pinget on ühendatud ühise maandusega.
See tõstatab nõude kasutada vooluahelat, et madalpinge pool saaks tõhusalt juhtida kõrgepingepoole MOSFET-i. Samal ajal seisavad kõrgepingepoole MOSFET silmitsi ka punktides 1 ja 2 mainitud probleemidega.
Nendel kolmel juhul ei suuda totemiposti struktuur vastata väljundnõuetele ja tundub, et paljud MOSFET-draiveri IC-d ei sisalda paisu pinget piiravaid struktuure.
Seega kujundasin nende kolme vajaduse rahuldamiseks suhteliselt üldise vooluringi.
)
NMOS-i draiveri ahel
Siin teen ainult NMOS-i draiveriahela lihtsat analüüsi:
Vl ja Vh on vastavalt odav- ja kõrgekvaliteedilised toiteallikad. Need kaks pinget võivad olla samad, kuid Vl ei tohiks ületada Vh.
Q1 ja Q2 moodustavad ümberpööratud totemiposti, et saavutada isolatsioon, tagades samas, et kaks juhttoru Q3 ja Q4 ei lülitu sisse samal ajal.
R2 ja R3 annavad PWM-i pinge referentsi. Seda viidet muutes saab vooluahelat kasutada asendis, kus PWM-signaali lainekuju on suhteliselt järsk.
Q3 ja Q4 kasutatakse ajami voolu tagamiseks. Sisselülitamisel on Q3 ja Q4 minimaalne pingelang Vce Vh ja GND suhtes. See pingelang on tavaliselt ainult umbes 0,3 V, mis on palju madalam kui 0,7 V Vce.
R5 ja R6 on tagasiside takistid, mida kasutatakse paisu pinge proovivõtmiseks. Valitud pinge tekitab tugeva negatiivse tagasiside Q1 ja Q2 kuni Q5 alustele, piirates seega paisu pinget piiratud väärtusega. Seda väärtust saab reguleerida R5 ja R6 kaudu.
Lõpuks annab R1 baasvoolupiirangu Q3 ja Q4 jaoks ning R4 annab MOSFET-i paisuvoolu piirangu, mis on Q3 ja Q4 jää piir. Vajadusel saab R4-ga paralleelselt ühendada kiirenduskondensaatori.
Sellel vooluringil on järgmised funktsioonid:
1. Kasutage kõrge külje MOSFETi juhtimiseks madalat pinget ja PWM-i.
2. Kasutage väikese amplituudiga PWM-signaali, et juhtida kõrge paisupinge nõudega MOSFET-i.
3. Paisupinge tipppiir
4. Sisend- ja väljundvoolu piirid
5. Kasutades sobivaid takisteid, on võimalik saavutada väga väike energiatarve.
6. PWM-signaal on inverteeritud. NMOS seda funktsiooni ei vaja ja selle saab lahendada inverteri ette asetamisega.
Kaasaskantavate seadmete ja juhtmevabade toodete kavandamisel peavad disainerid silmitsi seisma kahe probleemiga, millega disainerid peavad silmitsi seisma, toote jõudluse parandamine ja aku kasutusaja pikendamine. DC-DC muundurite eelisteks on kõrge kasutegur, suur väljundvool ja madal puhkevool, mistõttu need sobivad hästi kaasaskantavate seadmete toiteks. Praegu on alalis-alalisvoolu muunduri disainitehnoloogia arendamise peamised suundumused järgmised: (1) Kõrgsagedustehnoloogia: kui lülitussagedus suureneb, väheneb ka lülitusmuunduri suurus, samuti suureneb oluliselt võimsustihedus, ja dünaamiline reaktsioon paraneb. . Väikese võimsusega alalis-alalisvoolu muundurite lülitussagedus tõuseb megahertsi tasemele. (2) Madala väljundpinge tehnoloogia: pooljuhtide tootmistehnoloogia pideva arenguga langeb mikroprotsessorite ja kaasaskantavate elektroonikaseadmete tööpinge järjest madalamaks, mis nõuab tulevastelt alalis-alalisvoolu muunduritelt madalat väljundpinget, et kohaneda mikroprotsessoritega. nõuded protsessoritele ja kaasaskantavatele elektroonikaseadmetele.
Nende tehnoloogiate areng on seadnud kõrgemad nõuded toitekiibi vooluringide projekteerimisele. Esiteks, kuna lülitussagedus kasvab jätkuvalt, esitatakse lülituselementide jõudlusele kõrged nõuded. Samal ajal tuleb ette näha vastavad lülituselementide ajamiahelad, et tagada lülituselementide normaalne töö lülitussagedustel kuni MHz. Teiseks, akutoitel kaasaskantavate elektroonikaseadmete puhul on vooluahela tööpinge madal (liitiumpatareide näitel on tööpinge 2,5–3,6 V), seetõttu on toitekiibi tööpinge madal.
MOSFET-il on väga madal sisselülitamistakistus ja see tarbib vähe energiat. MOSFET-i kasutatakse sageli toitelülitina praegu populaarsetes kõrge efektiivsusega alalis-alalisvoolukiipides. Kuid MOSFETi suure parasiitmahtuvuse tõttu on NMOS-i lülitustorude paisu mahtuvus üldiselt sama suur kui kümned pikofarad. See seab kõrgemad nõuded kõrge töösagedusega alalis-alalisvoolu muunduri lülitustoru ajamahela projekteerimisele.
Madalpinge ULSI konstruktsioonides on mitmesuguseid CMOS- ja BiCMOS-loogikalülitusi, mis kasutavad suurte mahtuvuslike koormustena alglaadimisvõimendusstruktuure ja ajamiahelaid. Need ahelad võivad normaalselt töötada toitepingega, mis on alla 1 V, ja võivad töötada sagedusel kümneid megahertsi või isegi sadu megahertse koormusmahtuvusega 1 kuni 2 pF. Selles artiklis kasutatakse alglaadimisvõimendusahelat, et kujundada suure koormusmahtuvusega ajamiga ajamiahel, mis sobib madalpinge ja kõrge lülitussageduse võimendusega alalis-alalisvoolumuunduritele. Ahel on loodud Samsung AHP615 BiCMOS protsessi põhjal ja seda on kontrollitud Hspice simulatsiooniga. Kui toitepinge on 1,5 V ja koormusmahtuvus 60 pF, võib töösagedus ulatuda üle 5 MHz.
)
MOSFET-i lülitusomadused
)
1. Staatilised omadused
Lülituselemendina töötab MOSFET ka kahes olekus: väljas või sisse lülitatud. Kuna MOSFET on pingega juhitav komponent, määrab selle tööoleku peamiselt paisuallika pinge uGS.
Tööomadused on järgmised:
※ uGS<sisselülituspinge UT: MOSFET töötab väljalülitusalas, äravooluallika vool iDS on põhimõtteliselt 0, väljundpinge uDS≈UDD ja MOSFET on "väljas" olekus.
※ uGS>Sisselülituspinge UT: MOSFET töötab juhtivuspiirkonnas, äravooluallika vool iDS=UDD/(RD+rDS). Nende hulgas on rDS äravooluallika takistus, kui MOSFET on sisse lülitatud. Väljundpinge UDS=UDD?rDS/(RD+rDS), kui rDS<<RD, uDS≈0V, on MOSFET "sees" olekus.
2. Dünaamilised omadused
MOSFET-il on ka üleminekuprotsess sisse- ja väljalülitusolekute vahel, kuid selle dünaamilised omadused sõltuvad peamiselt ajast, mis kulub ahelaga seotud hajutatud mahtuvuse laadimiseks ja tühjendamiseks ning laengu kogunemisest ja tühjenemisest, kui toru ise on sisse ja välja lülitatud. Hajumisaeg on väga väike.
Kui sisendpinge ui muutub kõrgest madalaks ja MOSFET muutub sisselülitatud olekust väljalülitatud olekusse, laeb toiteallika UDD hajuv mahtuvus CL läbi RD ja laadimisaja konstant τ1=RDCL. Seetõttu peab väljundpinge uo läbima teatud viivituse, enne kui see muutub madalalt tasemelt kõrgeks; kui sisendpinge ui muutub madalast kõrgeks ja MOSFET muutub väljalülitatud olekust sisselülitatud olekusse, läbib hajuvmahtuvuse CL laeng rDS-i. Tühjenemine toimub tühjenemise ajakonstandiga τ2≈rDSCL. On näha, et ka väljundpinge Uo vajab teatud viivitust, enne kui saab minna üle madalale tasemele. Kuid kuna rDS on palju väiksem kui RD, on konversiooniaeg piirväärtusest juhtivusse lühem kui konversiooniaeg juhtivusest katkemiseni.
Kuna sisselülitatud MOSFET-i äravooluallika takistus rDS on palju suurem kui transistori küllastustakistus rCES ja väline äravoolutakistus RD on samuti suurem kui transistori kollektori takistus RC, on laadimis- ja tühjenemisaeg MOSFET on pikem, muutes MOSFETi Lülituskiirus on väiksem kui transistoril. Kuna aga CMOS-ahelates on laadimis- ja tühjendusahel mõlemad väikese takistusega vooluringid, on laadimis- ja tühjendusprotsess suhteliselt kiire, mille tulemuseks on CMOS-ahela suur lülituskiirus.
-
Suure paketiga MOSFET-draiveri skeem
-
Mis on väikese pingega MOSFETide roll?
-

Milline MOSFETi mark on hea
-

Kuidas määrata nMOSFET-e ja pMOSFET-e
-
Õige viis MOSFETide valimiseks
-

MOSFET-võimendite täielik juhend: alates B...
-

Kuidas valida sobivaim draiveri vooluring ...
-

Kas teate MOSFET-draiveri vooluringi?
-

MOSFETi põhituvastus ja testimine
-

Rääkige lühidalt h...
-

MOSFET värava allika kaitse
-

Kuidas teha kindlaks, kas suure võimsusega MOSFET on põlenud...
-

MOSFETi põhiteadmised
-
MOSFETide kolm peamist rolli
-

Kuidas vältida MOSFETi riket
-

Kas teadsite MOSFETi arengust?



